开环系统和闭环系统的抗扰动性能对比
实验目的:设输入电压为0时,扰动信号Td(s)=1/s,分别比较在无转速计开环控制状态下和有转速计闭环控制状态下电机输出转速稳定误差。
开环系统:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
|
Ra=1;Km=10;j=2;f=0.5;Kb=0.1;
num1=[1];den1=[j,Kb];sys1=tf(num1,den1);
num2=[Km*Kb/Ra];den2=[1];sys2=tf(num2,den2);
sys_o=feedback(sys1,sys2);
sys_o=-sys_o
[yo,T]=step(sys_o);
plot(T,yo)
title('Open-loop Disturbance Step Response')
xlabel('Time (sec)'),ylabel('\omega_o'),grid
yo(length(T))
|
实验结果:
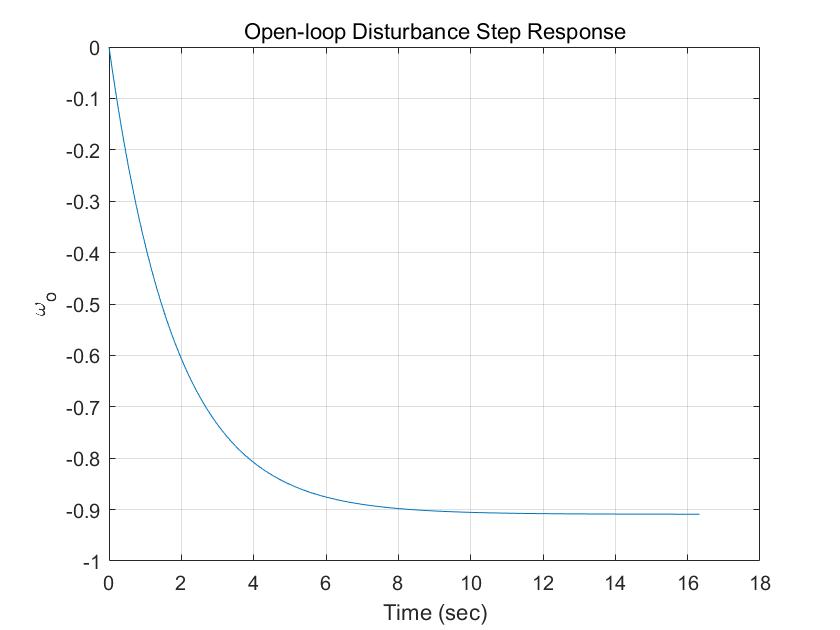 开环系统
开环系统
闭环系统:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
|
Ra=1;Km=10;J=2;b=0.5;Kb=0.1;Ka=54;Kt=1;
num1=[1];den1=[J,b];sys1=tf(num1,den1);
num2=[Ka*Kt];den2=[1];sys2=tf(num2,den2);
num3=[Kb];den3=[1];sys3=tf(num3,den3);
num4=[Km/Ra];den4=[1];sys4=tf(num4,den4);
sysa=parallel(sys2,sys3);
sysb=series(sysa,sys4);
sys_c=feedback(sys1,sysb);
sys_c=-sys_c
[yc,T]=step(sys_c);
plot(T,yc)
title('Closed-loop Disturbance Step Response')
xlabel('Time (sec)'),ylabel('\omega_c(rad/sec)'),grid
yc(length(T))
|
实验结果:
 开环系统
开环系统